目录
-
写在前面
-
1.1. Java IO读写原理
-
1.1.1. 内核缓冲与进程缓冲区
-
1.1.2. java IO读写的底层流程
-
1.2. 四种主要的IO模型
-
1.3. 同步阻塞IO(Blocking IO)
-
1.4. 同步非阻塞NIO(None Blocking IO)
-
1.5. IO多路复用模型(I/O multiplexing)
-
1.6. 异步IO模型(asynchronous IO)
写在前面
大家好,我是 高并发的实战社群【疯狂创客圈】尼恩。Java NIO 、 Reactor模式等基础原理性的知识,非常重要,无论开发、还是面试。
很多的小伙伴,被java IO 模型中,搞得有点儿晕,一会儿是4种模型,一会儿又变成了5种模型。
很多的小伙伴,也被nio这个名词搞晕了,一会儿java 的nio 不叫 非阻塞io,一会儿java nio 又是非阻塞io,到底是啥呢?
很多的小伙伴,被异步和非阻塞搞晕了。都非阻塞了,难道不是异步的吗?
这这,好难呀。
此文,从底层入手,给各位小伙伴,起底一下,java的四大io模型。需要面试的,或者没有弄清楚的小伙伴,彻底的有福了。
顺便说明下:
本文的内容只是一个初稿、初稿,本文的知识,在《Netty Zookeeper Redis 高并发实战》一书时,进行大篇幅的完善和更新,并且进行的源码的升级。博客和书不一样,书的内容更加系统化、全面化,更加层层升入、层次分明、更多次的错误排查,请大家以书的内容为准。
本文的最终内容, 具体请参考疯狂创客圈 倾力编著,机械工业出版社出版的 《Netty Zookeeper Redis 高并发实战》一书 。
1.1. Java IO读写原理
无论是Socket的读写还是文件的读写,在Java层面的应用开发或者是linux系统底层开发,都属于输入input和输出output的处理,简称为IO读写。在原理上和处理流程上,都是一致的。区别在于参数的不同。
用户程序进行IO的读写,基本上会用到read&write两大系统调用。可能不同操作系统,名称不完全一样,但是功能是一样的。
先强调一个基础知识:read系统调用,并不是把数据直接从物理设备,读数据到内存。write系统调用,也不是直接把数据,写入到物理设备。
read系统调用,是把数据从内核缓冲区复制到进程缓冲区;而write系统调用,是把数据从进程缓冲区复制到内核缓冲区。这个两个系统调用,都不负责数据在内核缓冲区和磁盘之间的交换。底层的读写交换,是由操作系统kernel内核完成的。
1.1.1. 内核缓冲与进程缓冲区
缓冲区的目的,是为了减少频繁的系统IO调用。大家都知道,系统调用需要保存之前的进程数据和状态等信息,而结束调用之后回来还需要恢复之前的信息,为了减少这种损耗时间、也损耗性能的系统调用,于是出现了缓冲区。
有了缓冲区,操作系统使用read函数把数据从内核缓冲区复制到进程缓冲区,write把数据从进程缓冲区复制到内核缓冲区中。等待缓冲区达到一定数量的时候,再进行IO的调用,提升性能。至于什么时候读取和存储则由内核来决定,用户程序不需要关心。
在linux系统中,系统内核也有个缓冲区叫做内核缓冲区。每个进程有自己独立的缓冲区,叫做进程缓冲区。
所以,用户程序的IO读写程序,大多数情况下,并没有进行实际的IO操作,而是在读写自己的进程缓冲区。
1.1.2. java IO读写的底层流程
用户程序进行IO的读写,基本上会用到系统调用read&write,read把数据从内核缓冲区复制到进程缓冲区,write把数据从进程缓冲区复制到内核缓冲区,它们不等价于数据在内核缓冲区和磁盘之间的交换。
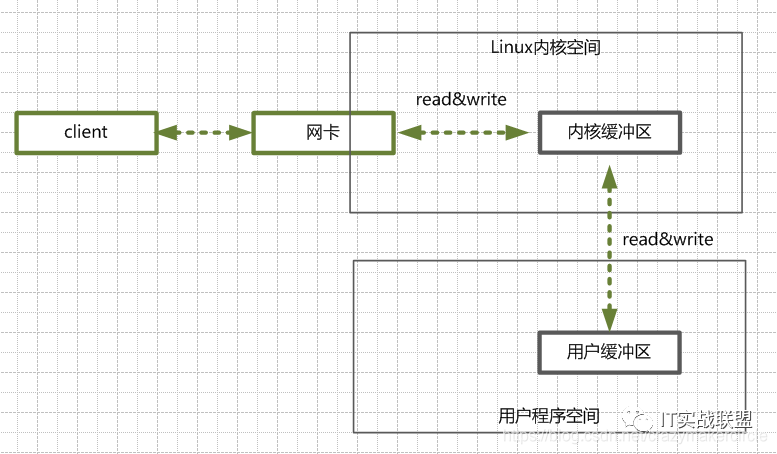
首先看看一个典型Java 服务端处理网络请求的典型过程:
(1)客户端请求
Linux通过网卡,读取客户断的请求数据,将数据读取到内核缓冲区。
(2)获取请求数据
服务器从内核缓冲区读取数据到Java进程缓冲区。
(1)服务器端业务处理
Java服务端在自己的用户空间中,处理客户端的请求。
(2)服务器端返回数据
Java服务端已构建好的响应,从用户缓冲区写入系统缓冲区。
(3)发送给客户端
Linux内核通过网络 I/O ,将内核缓冲区中的数据,写入网卡,网卡通过底层的通讯协议,会将数据发送给目标客户端。
1.2. 四种主要的IO模型
服务器端编程经常需要构造高性能的IO模型,常见的IO模型有四种:
(1)同步阻塞IO(Blocking IO)
首先,解释一下这里的阻塞与非阻塞:
阻塞IO,指的是需要内核IO操作彻底完成后,才返回到用户空间,执行用户的操作。阻塞指的是用户空间程序的执行状态,用户空间程序需等到IO操作彻底完成。传统的IO模型都是同步阻塞IO。在java中,默认创建的socket都是阻塞的。
其次,解释一下同步与异步:
同步IO,是一种用户空间与内核空间的调用发起方式。同步IO是指用户空间线程是主动发起IO请求的一方,内核空间是被动接受方。异步IO则反过来,是指内核kernel是主动发起IO请求的一方,用户线程是被动接受方。
(4)同步非阻塞IO(Non-blocking IO)
非阻塞IO,指的是用户程序不需要等待内核IO操作完成后,内核立即返回给用户一个状态值,用户空间无需等到内核的IO操作彻底完成,可以立即返回用户空间,执行用户的操作,处于非阻塞的状态。
简单的说:阻塞是指用户空间(调用线程)一直在等待,而且别的事情什么都不做;非阻塞是指用户空间(调用线程)拿到状态就返回,IO操作可以干就干,不可以干,就去干的事情。
非阻塞IO要求socket被设置为NONBLOCK。
强调一下,这里所说的NIO(同步非阻塞IO)模型,并非Java的NIO(New IO)库。
(3)IO多路复用(IO Multiplexing)
即经典的Reactor设计模式,有时也称为异步阻塞IO,Java中的Selector和Linux中的epoll都是这种模型。
(5)异步IO(Asynchronous IO)
异步IO,指的是用户空间与内核空间的调用方式反过来。用户空间线程是变成被动接受的,内核空间是主动调用者。
这一点,有点类似于Java中比较典型的模式是回调模式,用户空间线程向内核空间注册各种IO事件的回调函数,由内核去主动调用。
1.3. 同步阻塞IO(Blocking IO)
在linux中的Java进程中,默认情况下所有的socket都是blocking IO。在阻塞式 I/O 模型中,应用程序在从IO系统调用开始,一直到到系统调用返回,这段时间是阻塞的。返回成功后,应用进程开始处理用户空间的缓存数据。
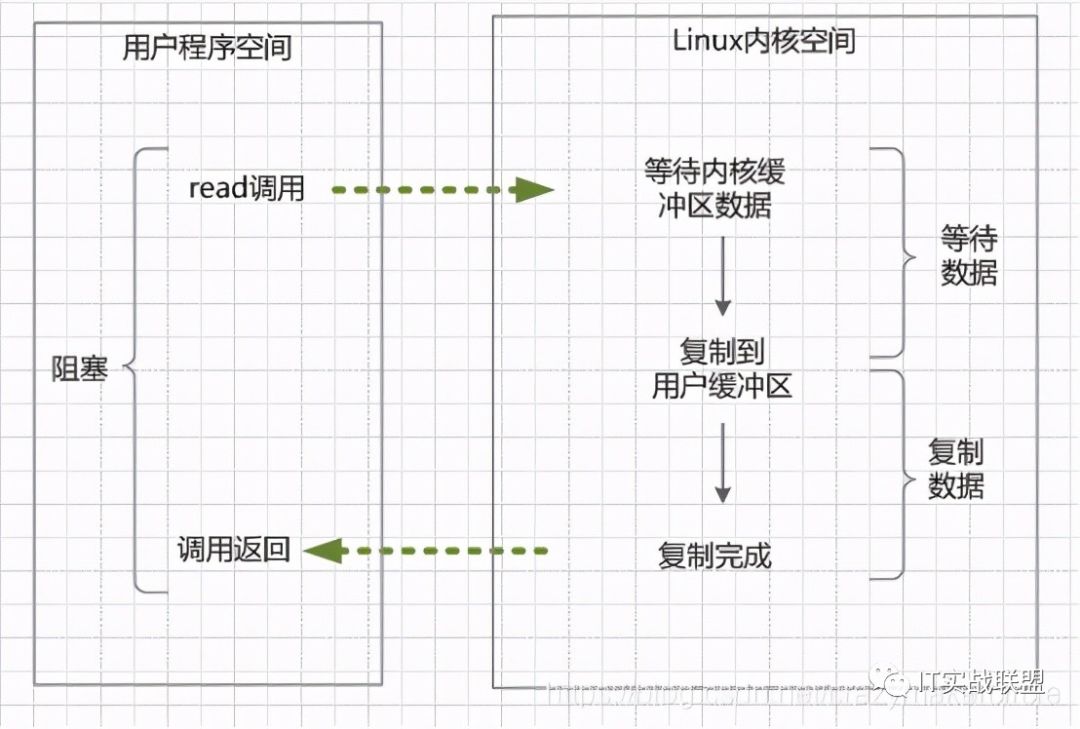
举个栗子,发起一个blocking socket的read读操作系统调用,流程大概是这样:
(1)当用户线程调用了read系统调用,内核(kernel)就开始了IO的第一个阶段:准备数据。很多时候,数据在一开始还没有到达(比如,还没有收到一个完整的Socket数据包),这个时候kernel就要等待足够的数据到来。
(2)当kernel一直等到数据准备好了,它就会将数据从kernel内核缓冲区,拷贝到用户缓冲区(用户内存),然后kernel返回结果。
(3)从开始IO读的read系统调用开始,用户线程就进入阻塞状态。一直到kernel返回结果后,用户线程才解除block的状态,重新运行起来。
所以,blocking IO的特点就是在内核进行IO执行的两个阶段,用户线程都被block了。
BIO的优点:
程序简单,在阻塞等待数据期间,用户线程挂起。用户线程基本不会占用 CPU 资源。
BIO的缺点:
一般情况下,会为每个连接配套一条独立的线程,或者说一条线程维护一个连接成功的IO流的读写。在并发量小的情况下,这个没有什么问题。但是,当在高并发的场景下,需要大量的线程来维护大量的网络连接,内存、线程切换开销会非常巨大。因此,基本上,BIO模型在高并发场景下是不可用的。
1.4. 同步非阻塞NIO(None Blocking IO)
在linux系统下,可以通过设置socket使其变为non-blocking。NIO 模型中应用程序在一旦开始IO系统调用,会出现以下两种情况:
(1)在内核缓冲区没有数据的情况下,系统调用会立即返回,返回一个调用失败的信息。
(2)在内核缓冲区有数据的情况下,是阻塞的,直到数据从内核缓冲复制到用户进程缓冲。复制完成后,系统调用返回成功,应用进程开始处理用户空间的缓存数据。
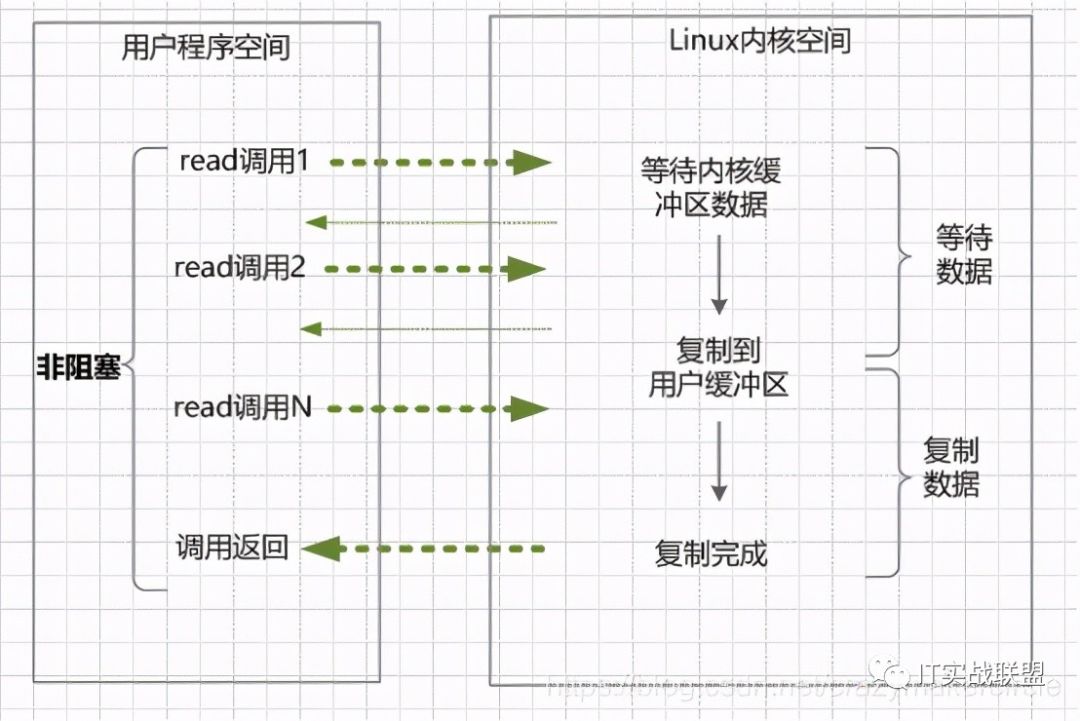
举个栗子。发起一个non-blocking socket的read读操作系统调用,流程是这个样子:
(1)在内核数据没有准备好的阶段,用户线程发起IO请求时,立即返回。用户线程需要不断地发起IO系统调用。
(2)内核数据到达后,用户线程发起系统调用,用户线程阻塞。内核开始复制数据。它就会将数据从kernel内核缓冲区,拷贝到用户缓冲区(用户内存),然后kernel返回结果。
(3)用户线程才解除block的状态,重新运行起来。经过多次的尝试,用户线程终于真正读取到数据,继续执行。
NIO的特点:
应用程序的线程需要不断的进行 I/O 系统调用,轮询数据是否已经准备好,如果没有准备好,继续轮询,直到完成系统调用为止。
NIO的优点:每次发起的 IO 系统调用,在内核的等待数据过程中可以立即返回。用户线程不会阻塞,实时性较好。
NIO的缺点:需要不断的重复发起IO系统调用,这种不断的轮询,将会不断地询问内核,这将占用大量的 CPU 时间,系统资源利用率较低。
总之,NIO模型在高并发场景下,也是不可用的。一般 Web 服务器不使用这种 IO 模型。一般很少直接使用这种模型,而是在其他IO模型中使用非阻塞IO这一特性。java的实际开发中,也不会涉及这种IO模型。
再次说明,Java NIO(New IO) 不是IO模型中的NIO模型,而是另外的一种模型,叫做IO多路复用模型( IO multiplexing )。
1.5. IO多路复用模型(I/O multiplexing)
如何避免同步非阻塞NIO模型中轮询等待的问题呢?这就是IO多路复用模型。
IO多路复用模型,就是通过一种新的系统调用,一个进程可以监视多个文件描述符,一旦某个描述符就绪(一般是内核缓冲区可读/可写),内核kernel能够通知程序进行相应的IO系统调用。
目前支持IO多路复用的系统调用,有 select,epoll等等。select系统调用,是目前几乎在所有的操作系统上都有支持,具有良好跨平台特性。epoll是在linux 2.6内核中提出的,是select系统调用的linux增强版本。
IO多路复用模型的基本原理就是select/epoll系统调用,单个线程不断的轮询select/epoll系统调用所负责的成百上千的socket连接,当某个或者某些socket网络连接有数据到达了,就返回这些可以读写的连接。因此,好处也就显而易见了——通过一次select/epoll系统调用,就查询到到可以读写的一个甚至是成百上千的网络连接。
举个栗子。发起一个多路复用IO的的read读操作系统调用,流程是这个样子:
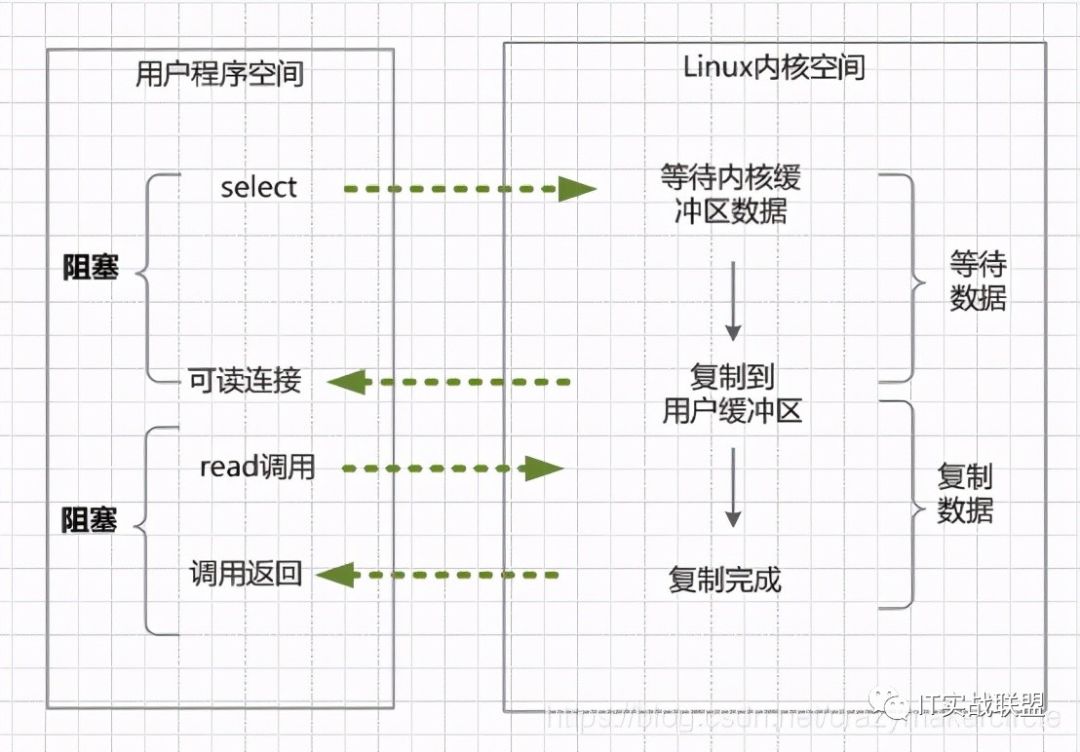
在这种模式中,首先不是进行read系统调动,而是进行select/epoll系统调用。当然,这里有一个前提,需要将目标网络连接,提前注册到select/epoll的可查询socket列表中。然后,才可以开启整个的IO多路复用模型的读流程。
(1)进行select/epoll系统调用,查询可以读的连接。kernel会查询所有select的可查询socket列表,当任何一个socket中的数据准备好了,select就会返回。
当用户进程调用了select,那么整个线程会被block(阻塞掉)。
(2)用户线程获得了目标连接后,发起read系统调用,用户线程阻塞。内核开始复制数据。它就会将数据从kernel内核缓冲区,拷贝到用户缓冲区(用户内存),然后kernel返回结果。
(3)用户线程才解除block的状态,用户线程终于真正读取到数据,继续执行。
多路复用IO的特点:
IO多路复用模型,建立在操作系统kernel内核能够提供的多路分离系统调用select/epoll基础之上的。多路复用IO需要用到两个系统调用(system call), 一个select/epoll查询调用,一个是IO的读取调用。
和NIO模型相似,多路复用IO需要轮询。负责select/epoll查询调用的线程,需要不断的进行select/epoll轮询,查找出可以进行IO操作的连接。
另外,多路复用IO模型与前面的NIO模型,是有关系的。对于每一个可以查询的socket,一般都设置成为non-blocking模型。只是这一点,对于用户程序是透明的(不感知)。
多路复用IO的优点:
用select/epoll的优势在于,它可以同时处理成千上万个连接(connection)。与一条线程维护一个连接相比,I/O多路复用技术的最大优势是:系统不必创建线程,也不必维护这些线程,从而大大减小了系统的开销。
Java的NIO(new IO)技术,使用的就是IO多路复用模型。在linux系统上,使用的是epoll系统调用。
多路复用IO的缺点:
本质上,select/epoll系统调用,属于同步IO,也是阻塞IO。都需要在读写事件就绪后,自己负责进行读写,也就是说这个读写过程是阻塞的。
如何充分的解除线程的阻塞呢?那就是异步IO模型。
1.6. 异步IO模型(asynchronous IO)
如何进一步提升效率,解除最后一点阻塞呢?这就是异步IO模型,全称asynchronous I/O,简称为AIO。
AIO的基本流程是:用户线程通过系统调用,告知kernel内核启动某个IO操作,用户线程返回。kernel内核在整个IO操作(包括数据准备、数据复制)完成后,通知用户程序,用户执行后续的业务操作。
kernel的数据准备是将数据从网络物理设备(网卡)读取到内核缓冲区;kernel的数据复制是将数据从内核缓冲区拷贝到用户程序空间的缓冲区。
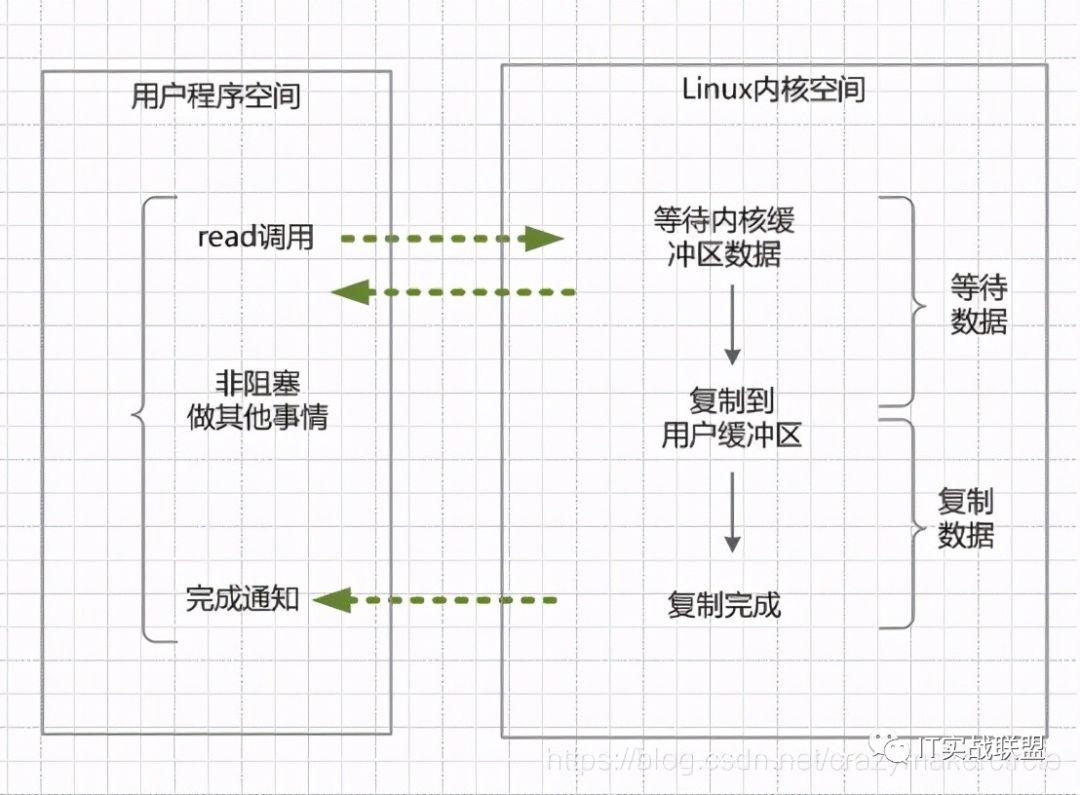
(1)当用户线程调用了read系统调用,立刻就可以开始去做其它的事,用户线程不阻塞。
(2)内核(kernel)就开始了IO的第一个阶段:准备数据。当kernel一直等到数据准备好了,它就会将数据从kernel内核缓冲区,拷贝到用户缓冲区(用户内存)。
(3)kernel会给用户线程发送一个信号(signal),或者回调用户线程注册的回调接口,告诉用户线程read操作完成了。
(4)用户线程读取用户缓冲区的数据,完成后续的业务操作。
异步IO模型的特点:
在内核kernel的等待数据和复制数据的两个阶段,用户线程都不是block(阻塞)的。用户线程需要接受kernel的IO操作完成的事件,或者说注册IO操作完成的回调函数,到操作系统的内核。所以说,异步IO有的时候,也叫做信号驱动 IO 。
异步IO模型缺点:
需要完成事件的注册与传递,这里边需要底层操作系统提供大量的支持,去做大量的工作。
目前来说, Windows 系统下通过 IOCP 实现了真正的异步 I/O。但是,就目前的业界形式来说,Windows 系统,很少作为百万级以上或者说高并发应用的服务器操作系统来使用。
而在 Linux 系统下,异步IO模型在2.6版本才引入,目前并不完善。所以,这也是在 Linux 下,实现高并发网络编程时都是以 IO 复用模型模式为主。
小结一下:
四种IO模型,理论上越往后,阻塞越少,效率也是最优。在这四种 I/O 模型中,前三种属于同步 I/O,因为其中真正的 I/O 操作将阻塞线程。只有最后一种,才是真正的异步 I/O 模型,可惜目前Linux 操作系统尚欠完善。
注意:本文归作者所有,未经作者允许,不得转载

